About Me




I'm Caleb Brady, a Mechanical engineer from New Zealand, Ireland and the U.S. I am a passionate engineer looking for a full time career starting after my graduation from Case Western in December 2025. I am interested in many engineering fields but most of my expertise is in drones which is heavily reflected in this portfolio.
Me and a couple friends started a DBF (design build fly) drone club 2 years ago to compete in a specific competition. This was the most impactful decision for my engineering career and I learned more through this club than I ever thought I would. Throughout my time I have been the mechanical and aero design lead, and then the chief engineer for this past year. We ended up winning our competition by placing first in the fly off, which is my proudest professional achievement so far.
For the future, I am heavily considering pursuing a technical masters but I am undecided on which one I want to get, but I think the opportunity to gain more technical knowledge early in my career holds a lot of value.
My ideal career is a fast paced highly technical engineering environment with new challenges to overcome every day.
Manufacturing Highlight


The component pictured above is one of the custom drone frame plates. This plate is made from 7075 aluminum which is cut to this complex geometry using a water jet. The pattern we decided on was largely based off of expected load paths and then heavily weight relieved. Cutting using the water jet does come with some downsides as we start to see some taper on the side of the part due to the shape of the jet. To get through this issue I conducted a taper compensation optimization study where I cut multiple sample pieces and iterated through taper compensation angles. This led us to be able to cut a frame plate with zero taper and perfect alignment with the multiple 3d print pieces and fasteners which interface with this part.
Detailed Design Highlights
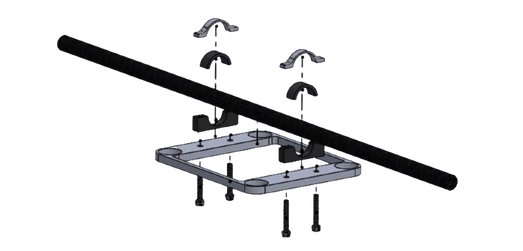
Parametric bulkhead for eVTOL tailsitter design
- Consisting of a 3d print, a rubber gasket, 7075 aluminum custom clips (threaded) and 7075 aluminum bulkhead
- Wingspar is clamped down into the 3dp and the rubber material using the fasteners & threaded clamps
- Mafacturing processes used: Waterjet, 3dp, drill press, laser cutting
3D print Mold for Triton (startup company)
- 3d printed design
- Made for polyeurethane casting of a band with electrical components spliced inside
- Material selection made with casting and setting properties in mind
- Guiding pins present for the other half of the mold.
- Draft angles on all features interfacing with the end result band

Conceptual Design Highlight

This PUGH chart was used crafted around the derived requirements referenced in the management section. After reading the RFP (request for proposal) AKA the rules of the competition, we assigned weight to each evaluation criteria, and then based on a subjective rating discussed by all sub teams we chose our most optimal configuration for our drone: the hexacopter.
Management
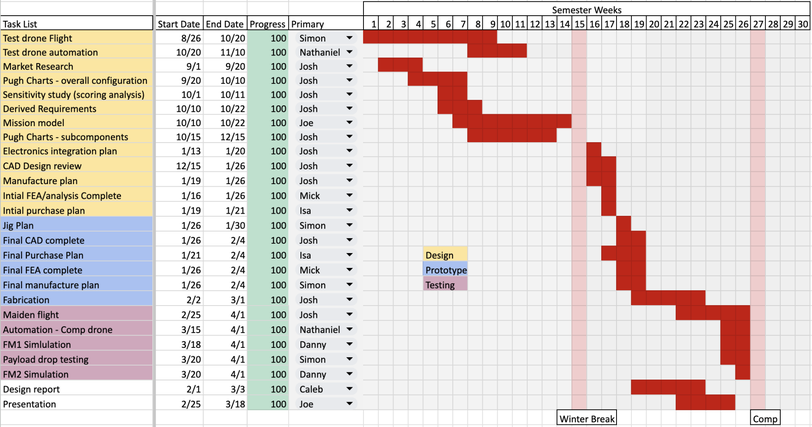
Above is a Gantt chart which I created to lead our drone design team through the year. The three phases on the left symbolized through the colors were design prototype and testing. Our team moved on schedule through most of the sections, and where needed we used up our designated float time.
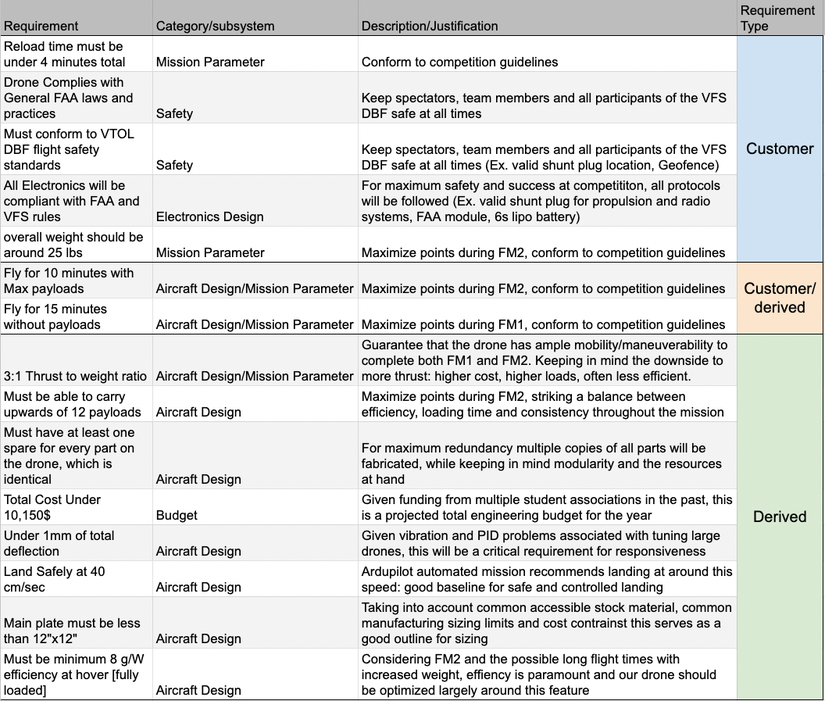
The derived requirements above were created in collaboration with a team of my skilled peers to outline the terms of our drone competition. We used these requirements to attack the design problem and outline our scoring criteria for critical design decisions.
Final Product

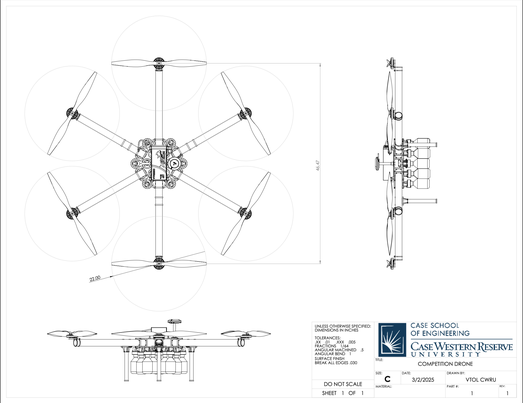
The above drone is the final product of the detailed design phase of our drone project. This CAD was carried out through the leadership of myself and our mechanical design lead Joshua Paine, but was done by a team of 5 or so individuals with varying levels of commitment and input. Below this section is a picture of the drone flying at competition and the first mock up.


Credits
This section is dedicated to people who have largely contributed to projects explained above.
- Joshua Paine - jxp923@case.edu
- Responsible for the majority of the modeling and detailed design associated with the drone
- Nathaniel Hahn - nrh51@case.edu
- Responsible for all of the electronic planning associated with the drone.
- Danyal Sainz-Gootenberg - dns47@case.edu
- Pilot and mechanical design team member for the drone